
چکیده: در این مقاله طرح کلی و کاربرد یک فلزیاب گوشی موبایل ارائه شده است. امروزه، فلزیابها نقش مهمی در نجات جان افراد در کاربردهای نظامی و غیرنظامی دارند. فلزیاب به یک گوشی موبایل مستقر در دستگاه {خودرو} متصل میشود. برای این مقاله، آشکارساز فلز به گونهای طراحی شده است که حسگر فلزی (نوسانگر Colpitts) بتواند هر جسم الکتریکی یا فلزی نزدیک را شناسایی کند. مدار آشکارساز فلزی صدایی تولید میکند که کاربر نهایی میتواند آن را از طریق گوشی موبایل بشنود. دستگاه شامل بورد arduino، یک مدار رابط L293D، و یک چارچوب محرک موتور است. {قطعات} الکترونیک به برد arduino مرتبط {متصل} هستند. بورد arduino علائمی را به بورد رابط L293D میفرستد که چارچوب محرک موتور را کنترل میکند. در جریان یک تماس، اگر هر دکمهای فشرده شود، تون مربوط به کلید فشرده شده در طرف دیگر تماس شنیده میشود. این تون، تون دوگانه چند فرکانسی (DTMF) نامیده میشود. دستگاه این تون DTMF را به کمک گوشی موجود در دستگاه دریافت میکند.
کلمات کلیدی: DTMF، بورد Arduino، L293D، موتورهای DC، فلزیاب
1- مقدمه
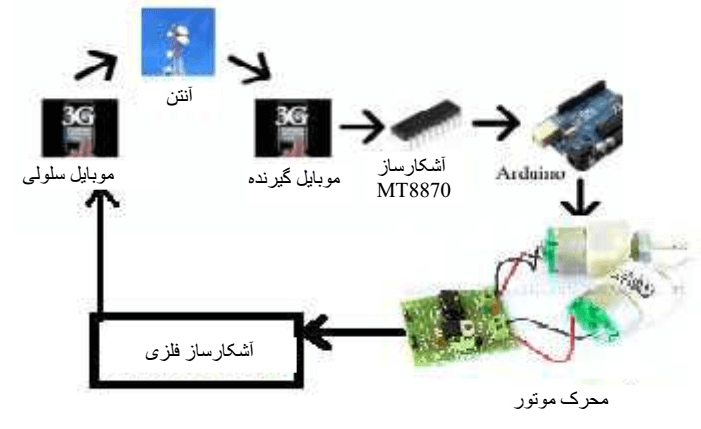
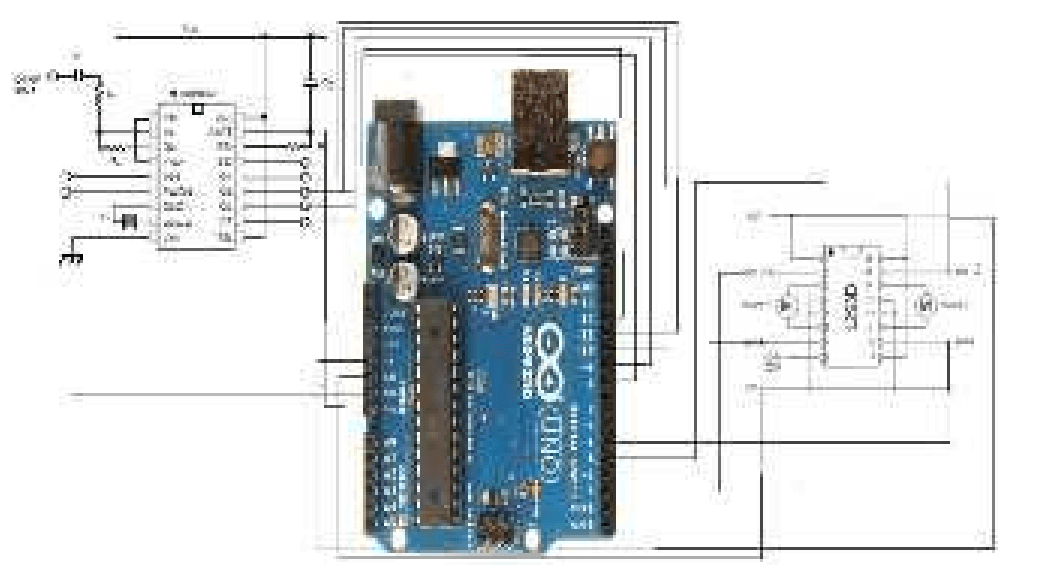
موبایلی که تماسی را به گوشی موبایل برقرار میکند، بر روی خودرو نصب میشود، و خودرو از راه دور کنترل میشود. بدین ترتیب این کار مکانیکی ساده نیاز به ساخت واحدهای فرستنده و گیرنده ندارد. خودرو میتواند ظرفیت شناسایی 90% فلزات را داشته باشد و بر روی مناطق مینگذاری شده با دقت 5 سانتیمتر حرکت میکند. جهت حفظ امنیت کاربر، خودرو باید قابلیت کار از راه دور داشته باشد. خودرو نباید هنگام تعیین محل مینها و بررسی ناحیه مینگذاری شده، مینها را منفجر کند. کنترل خودرو شامل سه مرحله خاص است که عبارتند از: مشاهده، آمادهسازی و فعالیت. برای بیشتر بخشها، شناساییکنندهها، حسگرهایی هستند که بر روی خودرو نصب میشوند؛ هدایت از طریق میکرو کنترلر یا پردازنده جایگذاریشده انجام میشود، و پیمایش با استفاده از موتورها انجام میشود. در چنین خودرویی، یک تلفن موبایل با گوشی موبایل نصب شده بر روی خودرو ارتباط برقرار میکند، و خودرو را کنترل میکند. اجزای مهم این خودرو، دیکدر DTMF، میکروکنترلر و محرک موتور هستند. از یک دیکدر DTMF سری MT8870 استفاده شده است. انواع مختلف سری MT8870 از تکنیکهای شمارش دیجیتال جهت آشکارسازی و دیکد کردن همه 16 جفت تون DTMF در یک کد چهار بیتی استفاده میکنند.
2- DTMF و طرز کار سیستم
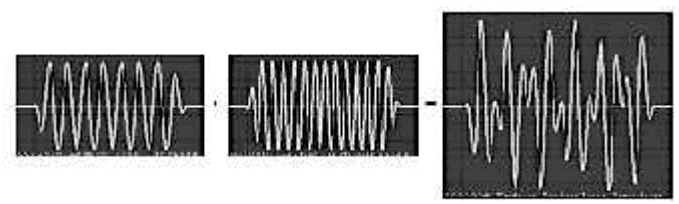
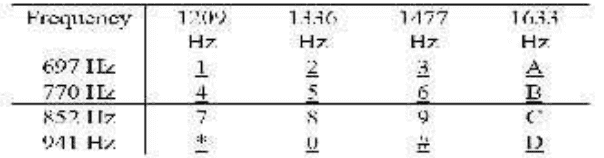
از سیگنالینگ DTMF برای نظارت تلفنی بر روی خط در باند فرکانسی صوتی تا مرکز تبادل تماس استفاده میشود. ورژن DTMF که برای ارسال تون تلفن استفاده میشود، به عنوان تون تماس {touch-tone} شناخته میشود. DTMF یک فرکانس خاص (شامل دو تون مجزا) را به هر کلید اختصاص میدهد تا مدار الکترونیکی بتواند بدون زحمت زیاد آن را تشخیص دهد. سیگنالی که توسط اینکدر {کد کننده} DTMF ساخته میشود، یک جمع لگاریتمی مستقیم دو موج سینوسی (کسینوسی) با فرکانسهای مختلف است؛ برای مثال، کلید 1، جهت ایجاد تون DTMF برای 1، از ترکیب یک سیگنال 697 Hz با یک سیگنال خالص 1209 Hz ایجاد میشود. یعنی در آزمونها، موج سینوسی 697 Hz به اضافه موج سینوسی 1209 Hz = تون 1 DTMF بر روی محور افقی میشود. فرکانس تون پیرامون 1900 Hz، نزدیک فرکانس 1906 Hz که در جدول 1 پیشبینی شده است (697+1209)، میباشد.
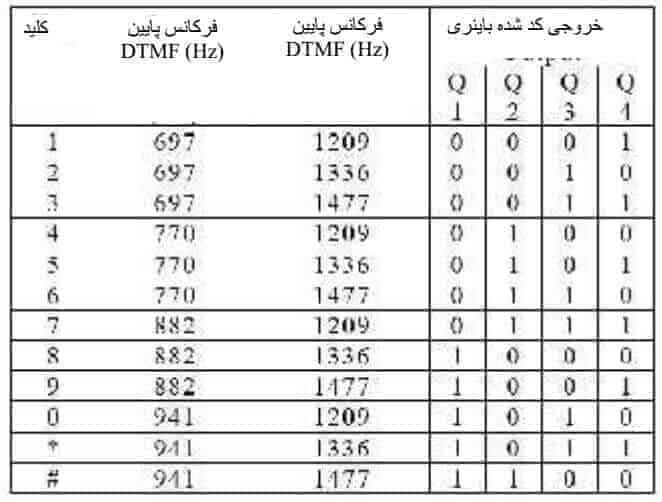
تونها و ترکیبات در سیستم DTMF در جدول 1 نمایش داده شدهاند.
3- آشکارساز DTMFی IC-CM8870
این IC، یک IC 18 پین است. ولتاژ کاری آن برابر 2.5V-5.5V است. یک سیم گوشی تلفن به سیم IC متصل میشود سیم دیگر به زمین متصل میشود. {اتصال} تلفن (گیرنده) به جک 5/3 میلیمتر به طرف فلیپ {flip} متصل میشود. گوشی موبایل باید در حالت پاسخ خودکار {auto answer} قرار بگیرد. از یک تلفن به تلفن دیگر {فرستنده} ارتباط برقرار کنید. کلیدهای روی تلفن راهدور را فشار دهید؛ اگر کلید 2 را فشار دهید، خودرو به جلو میرود؛ اگر کلید 8 را فشار دهید، خودرو به عقب میرود؛ کلید 4، به چپ و کلید 6 به راست میرود. چهار پین D0، D1، D2 و D3ی IC به هر بخش میکروکنترلر متصل میشود.
4- بورد Arduino UNO
این برد، مغز این دستگاه خودرو است که پروژه بر اساس آن وظایفش را انجام میدهد؛ این برد به IC دیکدر و محرک موتور متصل است تا چارچوب به صورت مناسب کار کند. Arduino یک قطعه الکترونیکی متن باز، ساده، قابل برنامهریزی و کاربردی است. Arduino میتواند محیط را توسط ورودی دریافتی از حسگرهای مختلف حس کند و به وسیله نورها، موتورها و سایر فعالسازهای کنترلشونده، بر پیرامونش اثر بگذارد. پروژههای Arduino میتواند تنها کار کند یا با نرمافزار اجرا شونده بر روی کامپیوتر (مثل فلش، پردازنده، و MaxMSP)، و سه گروه دیگر ارتباط بر قرار کند. LEDهای TX و RX، وقتی داده بین Arduino و دستگاههای متصل از طریق پورت سریال و USB مبادله میشود، روشن و خاموش میشوند. بخش سیاه مربعی کوچک در سمت چپ LEDها، یک میکروکنترلر کوچک است که رابط USB را کنترل میکند که به Arduino امکان میدهد تا داده را به رایانه ارسال کند و یا از رایانه دریافت کند.
5- IC محرک موتور (L293D)
ICهای محرک موتور L293D در اصل به عنوان بخشی از فناوری مکانیکی خود- ناظر {self-governing} مورد استفاده قرار میگیرد. بیشتر میکروکنترلرها در ولتاژ پایین و جریان کم کار میکنند، در حالی که موتور به ولتاژ و جریان نسبتا بیشتر نیاز دارد. در این خطوط {در این مقاله!} نمیتوان جریان موتور را از میکروکنترلر تامین کرد. این مسئله، یکی از الزامات اصلی IC محرک موتور است. ICی L293D سیگنالها را از میکروکنترلر دریافت میکند و سیگنال نسبی را به موتور ارسال میکند. این IC، دو پین ولتاژ دارد، یکی از آنها جهت تامین جریان برای فعالیت L293D است و دیگری برای فراهم کردن ولتاژ برای موتور استفاده میشود. L293D سیگنال را بر اساس اطلاعات حاصل از میکروکنترلرها، سوئیچ میکند. برای مثال: اگر میکروکنترلر یک 1 (سیگنال دیجیتال بالا{high} ) را به پین ورودی L293D بفرستد، L293D یک 1 (سیگنال دیجیتال بالا) را از پین خروجیاش به موتور میفرستد. نکته مهم دیگری که باید به آن توجه شود این است که L293D فقط سیگنالی را که دریافت میکند، ارسال میکند و به هیچ وجه علامت را عوض نمیکند. L293D یک IC 16 پینی است، که در هر طرف 8 پین دارد؛ کاربرد آن، کنترل یک موتور است. 2 پین ورودی {INPUT}، 2 پین خروجی {OUTPUT} و 1 پین فعالسازی {ENABLE} برای هر موتور وجود دارد. L293D شامل دو پل H است. تون دریافتی توسط میکروکنترلر atmega8 به کمک دیکدر DTMF (MT8870) مدیریت میشود. دیکدر، تون DTMF را حل میکند {دیکد میکند} و عدد دیجیتالی معادلش را بدست میآورد و این عدد موازی به میکروکنترلر فرستاده میشود. میکروکنترلر از پیش برای انخاب هر اطلاعات مناسب اصلاح شده است و انتخابش را به محرک موتور منتقل میکند؛ در عین حال هدف نهایی جهت تحریک موتور در جهت حرکت روبهجلو یا معکوس را در نظر میگیرد.
6- طرح سختافزار
تجهیزات {سختافزار دستگاه} شامل واحدهای زیر است: واحد منبع تغذیه، واحد آشکارسازی، واحد فعالسازی و واحد اختلال {disturbing unit}. طرح حسگر/نوسانساز. اندوکتانسی {ظرفیت سلفی} که باید محاسبه شود با استفاده از رابطه زیر محاسبه میشود:
![]()
که L، اندوکتانس بر حسب میکروهانری است، S عمق دور {پیچش} است، R بیانگر شعاع سیمپیچ است، و N تعداد دورهاست. برای هدف این پروژه، حسگری {سیمپیچی} نسبتا کوچک، مطلوب است. بنابراین، شعاع R و طول S به ترتیب برابر 0.04 و 0.004 انتخاب شده است.
بنابراین، با استفاده از معادله فوق جهت بدست آوردن مقدار L، وقتی S = 0.004 m، R = 0.02 m و N = 26 است، خواهیم داشت:
فرکانس جریان تخلیه نوسانی به دو عامل ظرفیت خازنی خازن مورد استفاده و اندوکتانس سلف سیمپیچ مورد استفاده جهت تولید نوسان 9.34 MHz بستگی دارد؛ تانک نوسان در شکل 4 در نظر گرفته شد. انتخاب 10 nF و 2.2 nF به گونهای لحاظ شده است که ظرفیت خازنی معادلشان وقتی با استفاده از معادله 1 با سلف ترکیب شود، فرکانس نوسان 9.34 MHz را بدهد.
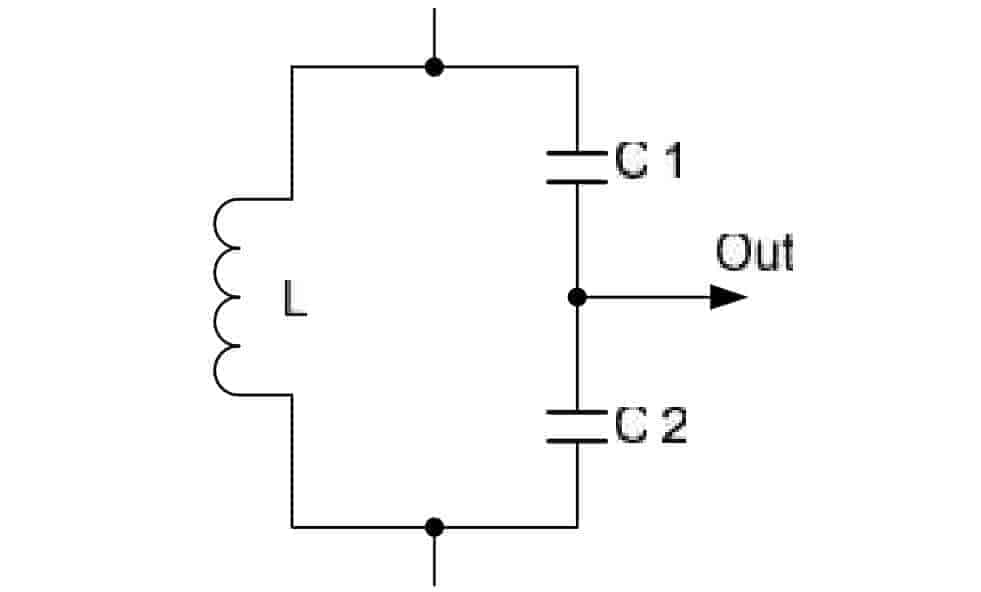
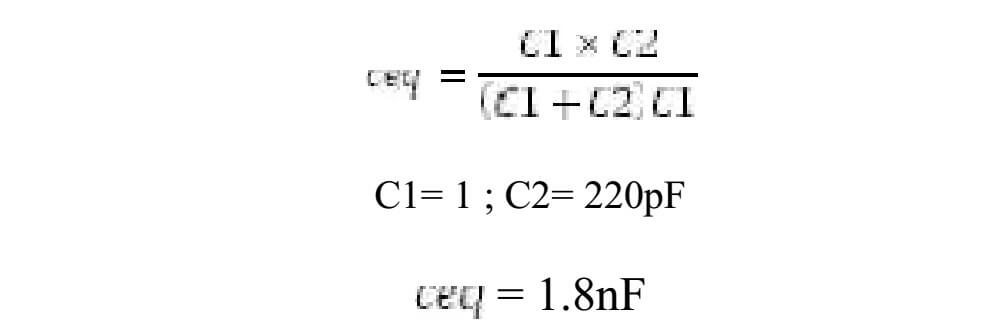
چون نوسانسازی که مورد استفاده قرار میگیرد، نوسانساز Colpitt است:
جهت با ثبات کرد نوسان تولید شده توسط تانک نوسان، یک ترانزیستور BC547 در نظر گرفته شده است. شیب تقویت کننده ترانزیستوری، همانطور که همه میدانیم، به صورت زیر است:
![]()
{تغییر در محور Vce/تغییر در محور Ic = 1/Re}
با انتخاب Re = 10 k = R3 Ic (جریان پیوسته کلکتور) در 100 میلیآمپر برای یک BC 547 است.
برای برای ترانزیستور BC547،
برای ولتاژ روی بیس ترانزیستور Q1:
مقاومتهایی که به عنوان مقسم ولتاژ عمل میکنند، به بیس Q1 متصل هستند؛ بدین ترتیب افت ولتاژ در R2 نصف Vcc خواهد بود:
برای Vcc = 12 v، VR2 = 6 v،
R2/R1+R2 = 0.5، با فرض R1 = R2
R1/2R1 = 0.5، فرض کنید R1 = 10k، پس R2 = 10k
خازن C3 طوری انتخاب شده است تا به عنوان بایپس ac برای R3 عمل کند در حالیکه C4 جهت فیلتر کردن یا بلوک کردن سیگنالهای dc انتخاب شده است، .
محاسبه RE = VE/IE
چون است،
محاسبه
Vcc = 10% از 12v

واحد تحریک، یک مدار شکلدهی است که قادر به تبدیل موج سینوسی به موج مربعی مطلوب است، و یک خروجی پایین یا بالای کافی میدهد؛ جهت این کار، CD4093 انتخاب شده است. CD4093 یک محرک {trigger} اشمیت {Schmitt} با دو گیت NAND ورودی است، اما تنها دو گیت NAND مورد نیاز است؛ یکی برای تبدیل شکل موج سینوسی به مربعی و دومی برای تبدیل شکلموج مربعی به خروجی بالا {high} یا پایین {low}.

7- واحد هشداردهی
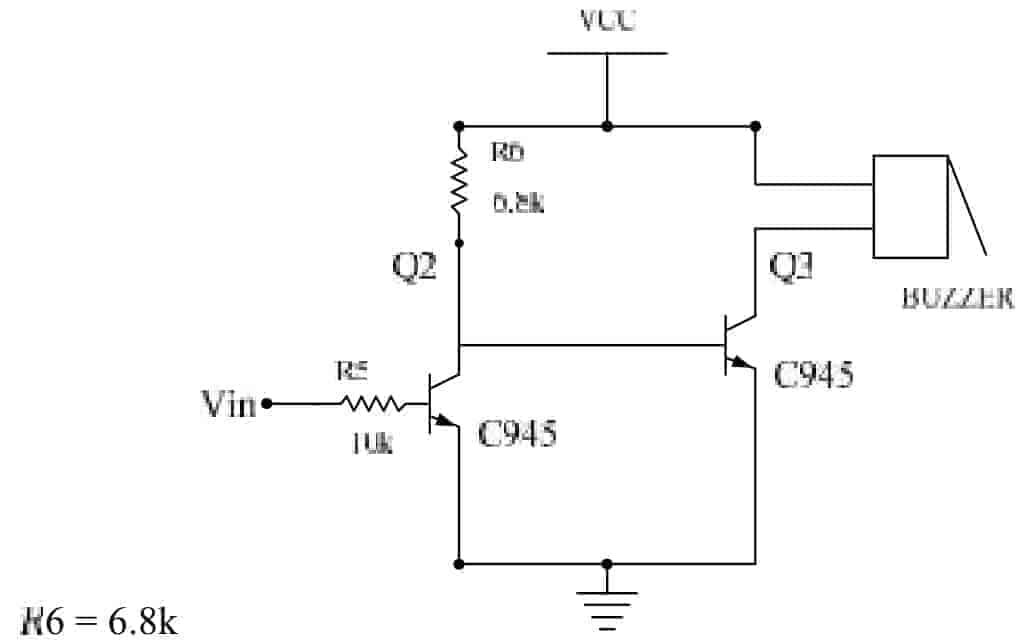
چون خروجی واحد تحریک بالا یا پایین است، یک آرایش سوئیچ ترانزیستور مورد نیاز است تا به نحو مناسبی توان بازر {buzzer} را فراهم کند. مقدار بالای CD4093 معادل Vcc است. بازر در مقدار بالا {high}، خاموش است که به معنی این است که ترانزیستور Q2 اشباع شده است و ترانزیستور Q3 از مدار خارج شده است {cut off}. در مقدار پایین {low}، Q2 از مدار خارج میشود و Q3 در حالت اشباع قرار میگیرد و Vout = (sat) = 0.2 v. وقتی افت ولتاژ بر روی بازر برابر Vcc- Vc (sat) میشود، بازر اعلام هشدار میکند. عملکرد یک ترانزیستور در حالت اشباع به وسیله مقدار تعیین میشود.
از شکل 4:
![]()
جهت تعیین مقدار حداقل Rb مورد استفاده از معادله 6،
IE = 1.15، برای Vcc = 12 v، Vbe = 0.7 و ![]()
{kind=link}
پس،![]()
مقاومت 10 k انتخاب مناسبی برای RE است زیرا 10k > 9826.1 است. بنابراین، R5 = 10k. R6 مورد استفاده قرار گرفته است تا جریانی را که به کلکتور Q2 وارد میشود، محدود کند.
دریافت اصل مقاله به زبان انگلیسی